
OS学习笔记---(二)存储器
OS学习笔记---(二)存储器
概述
访问数据的有效时间TA计算
TA=A*TC+(1-A)*TM
(TC访问cache,TM访问内存)
内存的分配与回收
数据结构:主存资源信息块、空闲队列、等待队列、分配程序
相关策略:分配策略、放置策略(选择一个空闲区)、调入策略、淘汰策略
内存共享与保护
内存共享:共享程序或数据、可以实现通信、节省空间
内存保护:进程互不影响(界地址保护)
界地址保护包括
- 上下界(定义地址区间
- 基地址限长(差不多
地址映射
将逻辑地址映射到相应的物理地址的过程
物理地址:真实地址
主存空间:物理地址的集合
逻辑地址(相对地址、虚地址):用户程序地址
程序地址空间:所有逻辑地址集合对应的空间
地址的映射可以在多个场合:
- 编程或者编译时
- 程序装入过程中(载入内存时)发生映射---静态地址映射
- 程序运行时(指令或者数据访问:malloc等)---动态地址映射
内存扩充
主存容量不足
实现方法:
- 全部代码和数据放入辅存
- 当前执行步骤涉及的部分代码放入主存
- 所需数据不在时,从辅存调入信息
虚拟存储器
由于主存和辅存之间的动态调度,使存储器比主存的容量大很多,这个存储器可以称为虚拟存储器
核心思想:
- 分离逻辑地址和物理地址
- 分离存储空间和虚地址空间
- 提供地址变换(映射)
程序的二维地址结构:若干段组成
(代码段、数据段、堆栈段)
连续存储管理方式
固定分区
物理内存被分为大小和数量固定的分区
且每个分区只能装一个程序(分区大小其实可以不固定)
动态分区分配
可变分区的大小、数量都可变
分配时按需分配,回收时可以合并成较大分区
分配算法
-
首次适应算法
将程序装入主存足够且地址最低的空闲区(低地址往高处遍历,找到刚好满足的空闲区)
尽量保证在高地址保留大空闲区
-
最佳适应算法
将程序装入主存中大小接近的空闲区(大一点点)
空闲区由小到大排序
尽量保存大的空闲区
-
最坏适应算法
将程序装入差距最大的空闲区(程序大小和空闲区大小差距最大)
空闲区由大到小排序
尽量保证空闲区内的剩余部分较大
回收算法
BG:存在碎片问题,多个分散小内存空间碎片,穿插在主存空间
将碎片空间移到一侧连成较大空闲区
分页存储
页面:程序地址空间被分成2^k个片段(虚页)
页框:物理内存被分为等大的片(实页)

页号位数决定了页面总数、页面大小决定了页内地址的位数
逻辑地址的具体位置:
页号:逻辑地址/页内地址位数
页内地址:逻辑地址%页内地址位数
相当于改变进制(10进制改成16进制也是这么算)
页表(PTE):映射页号到物理块号
-
存储页号和块号(实际上只存块号)
-
PTE的个数由分页大小和PTE大小决定:分页大小/PTE大小
如果页表存储在内存中,会增加访存时间,可以采用以下办法解决:
在缓冲存储器中存放当前使用的快表
快表存储着当前用到的页号和对应的块号
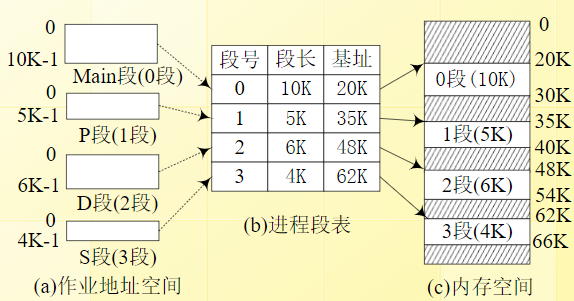
段式存储管理
段式逻辑地址构成:

段表:段号+段长+基地址
段页式存储管理
分段:信息的逻辑划分、段长可变
分页:信息的物理划分、页大小固定
段页式将两者相结合,逻辑地址结构如下:

虚拟存储系统
利用外存的空余空间,逻辑上对内存容量进行扩充的存储系统
页式系统:
- 简单页式系统:装入程序的全部页面才能运行
- 请求页式系统:装入一个程序的部分页面即可
(扩充页表=页号+物理块号+状态位+访问字段(状态)+修改位+外存地址)
缺页处理:
就是执行指令时开始地址转换,(没越界的话)使用页号检索表检索
如果不在页表内,则产生缺页中断,请求调页:
-
保留CPU现场
-
得到页面外存地址
-
如果内存没满,就分配内存块,读入缺页
如果满了,就选择一页换出(该页没被修改)
该页如果被修改了,就先将该页写回外存
-
修改页表重新执行
tips:保留现场就是保留上下文:保留处理器状态、程序计数器、寄存器、标志位等
主存和辅存之间频繁置换会出现颠簸(抖动)
页面置换策略、算法
可变分配全局置换、固定分配局部置换、可变分配局部置换
(可变指分配的内存数量、局部指只影响单个进程空间)
置换算法:
-
最佳置换算法(理论算法,进程的页面走向是未知的,无法预知)
-
先进先出(容易实现,但存在Belady现象:内存块增多,缺页率上升)
-
LRU(最近最久未使用)
-
LFU(最近最少使用)
-
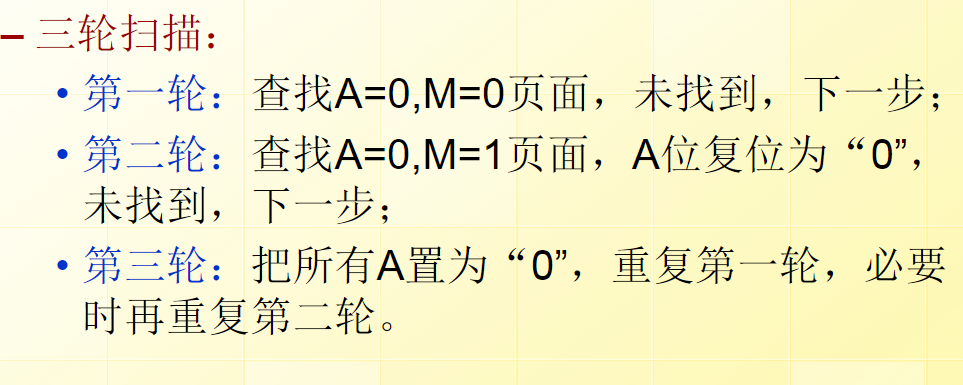
时钟算法(NRU)最近未使用算法,循环检查
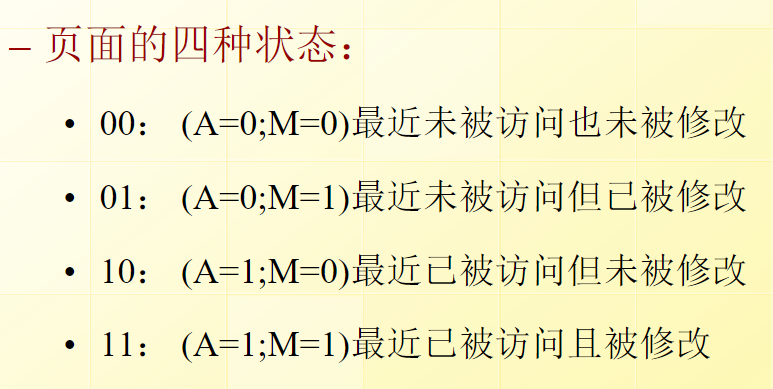
循环扫描过程:
页面缓存置换算法
简单描述:放一个缓冲区存放被置换的页面,方便快速恢复访问(从而避免缺页中断)
注意:缓冲区本身也是会满的,也要有对应的页面置换策略(算法)
具体流程:
- 选择页面:当需要替换一个页面时(例如,当发生缺页中断并且所有的内存帧都已被占用时),算法首先选择一个页面进行置换。这个选择可以基于FIFO(先进先出)、LRU(最近最少使用)或其他页面置换策略。
- 使用缓冲区:被选中的页面不会立即从物理内存中删除,而是移动到一个缓冲区。这个缓冲区是内存中的一个特殊区域,用于临时存放被置换的页面。
- 重新访问检查:如果被置换的页面很快再次被访问(在它仍然在缓冲区内时),它可以快速被恢复到物理内存中,而不需要从硬盘上重新加载,从而避免了一次缺页中断。
Linux内存管理机制
虚拟地址空间:
32位系统是2^32=4GB,这里的位指一位可以决定一字节(字节编址)
每个进程的虚拟地址空间都是独立的
Linux内存采用分页机制,采用四级页表(PGD、PUD、PMD、PTE)
(分别对应,全局,上级,中间,页表)四种目录项结构都定义在 page.h中
内核空间在系统启动的过程中加载了操作系统的内核
用户空间的管理采用的是伙伴系统,实现对内存页框的分配和回收,页框是管理的最小单位(页面装入页框,页框是内存分配的基本单位)
使用slab机制处理小于页框的页面:
- 缓存层次:Slab分配机制引入了一个缓存层次,这个缓存层次由一系列的“caches”组成。每个cache专门用于管理一定大小的内存块。
- Slab的概念:每个cache被分割成多个“slab”,一个slab是一组连续的页框(通常是一个或多个连续的物理页)。每个slab又被进一步分割成特定大小的内存块,用于满足小于一个页框大小的分配请求。
将四级页表中间表项数量设置为1即可当作二级页表使用
一致内存访问UMA:内存连续,CPU可以一致访问
非一致内存访问NUMA:每个CPU访问本地比较快,访问其他CPU会比较慢
内存以节点为其实,每个节点关联一个CPU(pg_data_t) 可以穿起来构成单向链表
伙伴系统
每次分一半给你(好伙伴!)
内核虚拟地址空间:3:1(3是全局的进程虚拟地址空间)
(有点看不下去了,下次看linux源码的时候再补充吧)
接下来是刷题时间
ID:53
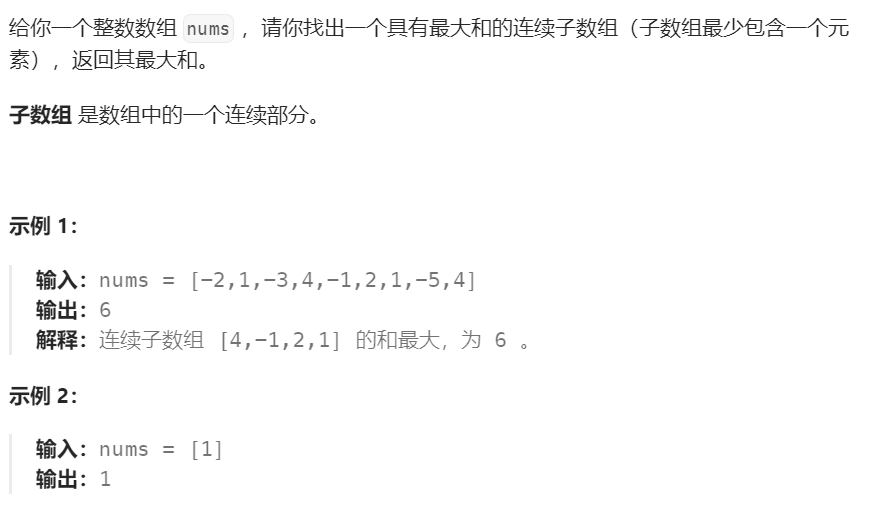
还是动态规划,我一直以为判断条件是加上这个数会不会变大,
没有考虑到,如果我前面加了这么多,还不如新的大,不如重新开始加
下面的评论说的很好:

answer:
class Solution {
public:
int maxSubArray(vector<int>& nums) {
int n=nums.size();
if(n==1)return nums[0];
int tmp=nums[0];
int i=1;
int ans=nums[0];
while(i<n){
tmp=max(tmp+nums[i],nums[i]);
ans=max(tmp,ans);
i++;
}
return ans;
}
};
唉,今天的面试比较稀碎,有点难受
复习去了,下次加油吧
存储器&pics=/upload/bro-takes-photos-z_JmtcoSKiU-unsplash.jpg&summary=){kind=link}
存储器&pics=/upload/bro-takes-photos-z_JmtcoSKiU-unsplash.jpg&desc=){kind=link}
 微信
微信
 支付宝
支付宝