
CPP学习日记---(三)
CPP学习日记---(三)
多态
经典面经题,当时没答好很难受
简单理解的话,所谓的多态无非是派生类重写基类的一些成员函数
但是,这里有一点值得注意,如下面的代码段所示,我们在调用派生类方法时,如果直接使用了派生类的对象指针(或对象)
那么会直接调用派生类定义的成员函数,而不是调用覆盖或者重写的函数
//second_class.cpp
//错误示范(没加virtual关键字)
int second_class::test_base_method(){
std::cout<<"here is base class "<<std::endl;
return 0;
}
int first_child::test_base_method(){
std::cout<<"here is child class"<<std::endl;
return 1;
}
//main.cpp
second_class* base_one = new second_class(2023);
first_child* derived_one = new first_child(2024);
//调用基类函数
cout<<base_one->test_base_method()<<endl;
//切换指针,指向派生类
base_one = &(*derived_one);
//试图调用派生类函数
cout<<base_one->test_base_method()<<endl;
//直接调用派生类函数
cout<<derived_one->test_base_method()<<endl;
输出结果:
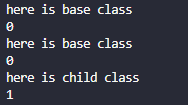
可以看到,没有virtual并不能实现多态功能
原理:此时的test_base_method()已经在编译的时候被绑定为基类的版本,即API静态链接到了基类的函数
多态的核心:通过基类的指针或者引用去调用派生类重写的方法
而不是说直接调用派生类同名函数就算多态
加入virtual后即可实现多态
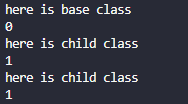
这样同名同参,实现效果也可以不一样
底层原理
-
加入virtual关键字后,编译器在编译后会创建虚函数表和虚函数表指针
-
每个对象在实例化的时候,如果所在类含有虚函数,那么会创建一张对应的虚函数表,包含了各个虚函数指针
-
在Base类调用
test_base_method()时,会通过虚函数指针查看指向的虚函数表,从而决定调用Base类还是Derived类 -
所以这里的函数在编译过程中并不会直接链接到某个实现,而是在运行时去根据指针指向的类型(虚函数表指针具体指向哪张虚函数表)来动态链接到那个实现
tips:在定义的时候可能还没想好虚函数要具体实现什么
可以先定义一个纯虚函数 like
virtual int area() = 0;其中的
=0向编译器声明了该虚函数为纯虚函数
动态链接
这里的动态链接和我之前的异构计算笔记中的动态链接有点像,但又不太一样
CPP虚函数的动态链接
- 感觉像是mini版的编译动态链接库(缩小成了一张表),在编译时并不去链接对应的实现,而在调用时才根据指针指向的类型(或者说虚函数表指针指向的表)动态链接对应的实现
异构计算笔记中的动态链接是指编译时刻的动态链接
- 编译阶段:编译器会检查这些外部库的引用
- 链接阶段:静态链接会将对应库的实现合并进可执行文件,而动态链接只负责保留动态链接库的引用,而不是将代码合并
- 运行时阶段:当程序运行时需要调用动态链接库中的接口时,动态链接库会被加载进内存,然后OS的动态链接器会解析调用的引用,然后找到实际内存地址进行实现
接口(抽象类)
和java的接口不同,CPP的接口是抽象类
抽象类无法实例化,而且接口的派生类必须重写基类的纯虚函数


和正常的接口设计一致,CPP的接口可以说是函数与变量的集合,可以用来概括一些类的行为和特征
比如可以定义一个接口,含有吃饭、睡觉等成员纯虚函数
动物继承时需要重写相应的代码实现
友元函数
之前讲过一次,但当时只是浅浅使用了一下
而且只用到了友元函数三条实现方式中的一条
友元函数的主要实现方式:
-
全局函数:在类内声明该函数为友元函数,允许它访问类内的一些私有或者保护变量
-
友元类:允许一类对象对另一类对象对该类进行访问(所有成员)
-
成员函数做友元:不建议使用
因为这样往往会形成循环依赖问题(我就遇到了),例子如下
class first_child :public second_class{ public: first_child(int _public_value); ~first_child()=default; int test_base_method() override; //下面这行声明会报错 friend void friend_class::visit(first_child* first_child_test); //friend class friend_class; //void test_pure_virtual_method() override; }; class friend_class :public second_class{ public: void visit(first_child* first_child_test); friend_class(); friend_class(int _public_value); ~friend_class()=default; };如果先声明
first_child就会报错未声明friend_class如果先声明
friend_class就会报错未声明first_child虽然可以前向声明一部分,再补充声明,但这已经得不偿失了,不如直接声明
friend class friend_class;
tips: 友元类可以不用先声明
原理和更详细的例子如下(4.0提供)
class A {
friend class B; // B可以是之前未声明的类
public:
void doSomething() {}
};
class B {
public:
void accessA(A& a) {
a.doSomething(); // B可以访问A的私有和保护成员
}
};
在这个例子中,即使在B被声明之前,A已经将B声明为友元。这是允许的,因为友元关系告诉编译器B将能够访问A的非公共成员,但这并不要求B在声明A时已经完全定义。
然而,当你试图声明一个类的特定成员函数为另一个类的友元时(如 friend void B::someFunction();),编译器需要知道那个成员函数的完整签名,这通常要求友元类至少已经部分定义,特别是当友元函数是类的成员函数时。这就是为什么在尝试声明friend_class::visit为first_child的友元时出现了错误,因为编译器在处理first_child的定义时还没有遇到friend_class的完整定义,包括visit函数的声明。
static 关键字
在面向对象编程中,static 关键字主要分为以下几种用途:
静态成员变量、静态成员函数、静态局部变量、静态链接和静态持续性
-
静态局部变量:
这点其实和面向对象编程关系不算很大,因为这在我们面向过程编程中也遇到过
实现效果就是函数内部的静态局部变量在第一次调用后就初始化,然后生命周期持续到程序结束:这意味着每次进入该函数,静态局部变量都保持着上次离开时的状态
-
静态成员变量:
其实就是静态局部变量放在了类中,实现的效果类似:程序开始时初始化,静态成员变量一直生存到程序结束
属于类本身,可以直接通过类进行访问
-
静态成员函数:
也属于类本身,可以直接通过类进行调用
同时不能访问类内部的非静态成员(因为static没有this指针,不需要特定实例就能调用)
-
静态链接:
给当前声明(或定义)增加static关键字会将当前变量或者成员函数限制在当前文件中,其他文件不可访问,否则会报错如下:

底层原理:
上一章说过CPP运行的内存分区,其中的全局区就存储着这些静态变量
同时,静态成员函数也是如此,其原理或者表现形式和全局函数很像,只不过作用域只局限在类内
菱形继承问题
问题背景:一个类通过两条路径继承自同一个基类(继承路径中出现环了)
Base / \ Derived1 Derived2 \ / MostDerived
问题严重性:
如果Base类中有成员变量被Derived1,Derived2同时继承,那么到最后的MostDerived 类就会出现冲突(歧义)
如果进行再次定义的话,很可能会出现数据冗余(因为这个派生类需要一份数据即可)
**解决办法:**虚拟继承
底层原理:
编译器在检测到虚拟继承时,会添加隐藏的虚拟指针和虚拟表
虚拟指针指向虚拟表,虚拟表包含了指向基类的数据成员的指针
当派生类继承这两个类时,内部的数据成员会直接指向共同基类的数据成员
这样就避免了数据冗余和访问歧义
实现方式:
class Derived1 : virtual Base{/**/}
class Derived2 : virtual Base{/**/}
本来应该再写一点的,但是面向对象应该到这里就结束了
我们下一章再见
参考资料
&pics=https://typora-zrx.oss-cn-beijing.aliyuncs.com/img/2024/02/18/20240218-144634.jpg&summary=){kind=link}
&pics=https://typora-zrx.oss-cn-beijing.aliyuncs.com/img/2024/02/18/20240218-144634.jpg&desc=){kind=link}
 微信
微信
 支付宝
支付宝